基于 jdk8 https://docs.oracle.com/javase/8/docs/api/index.html
概览

Executor
该接口只有一个方法 execute(Runnable command) 用于执行提交的 Runnable 任务。这个接口的目的是把任务的提交从任务的运行细节中进行解耦,使用者只需要提交任务到执行器,屏蔽了执行器使用线程、进行调度的具体细节。使用了执行器后不需要为每一个任务调用 new Thread(new RunnableTask()).start()。
注意,Executor 接口不严格限制实现类必须异步执行任务,执行器可以通过直接调用 r.run() 在调用线程中运行提交的任务。也就是说提交的任务有可能在一个新线程中执行,有可能在一个线程池中执行,也有可能在调用线程中执行。
JUC 包中提供的实现类同时也都实现了一个功能更丰富的接口 ExecutorService 。
ThreadPoolExecutor 是一个可扩展的线程池实现类。
Executors 工具类为创建不同种类的线程池实现类提供了方便的工厂方法。
提交任务遵循 Happens-before 顺序
ExecutorService
属于 Java 中的 Executor 框架。它提供了管理终止和跟踪异步任务进度的方法。ExecutorService 可以被关闭,这将导致它拒绝新的任务。提供了两种不同的方法来关闭ExecutorService 。shutdown 方法允许之前提交的任务在终止之前执行,而 shutdownNow 方法则防止等待任务启动并尝试停止当前正在执行的任务。在终止时,执行器没有任务正在执行,没有任务等待执行,也不能提交新的任务。未使用的 ExecutorService 应该被关闭以允许回收其资源。方法 submit 通过创建并返回可用于取消执行和/或等待完成的 Future 来扩展基本方法Executor.execute(Runnable)。方法 invokeAny 和 invokeAll 执行最常用的批量执行形式,执行一组任务,然后等待至少一个或全部完成。Executors 类提供了工厂方法,用于提供此包中提供的执行器服务。
AbstractExecutorService
AbstractExecutorService 类提供了 ExecutorService 执行方法的默认实现。在默认实现的 submit、invokeAny 和 invokeAll 方法中,会把参数 Runnable 或 Callable 使用过 newTaskFor 方法包装成 RunnableFuture 对象来运行。
ThreadPoolExecutor
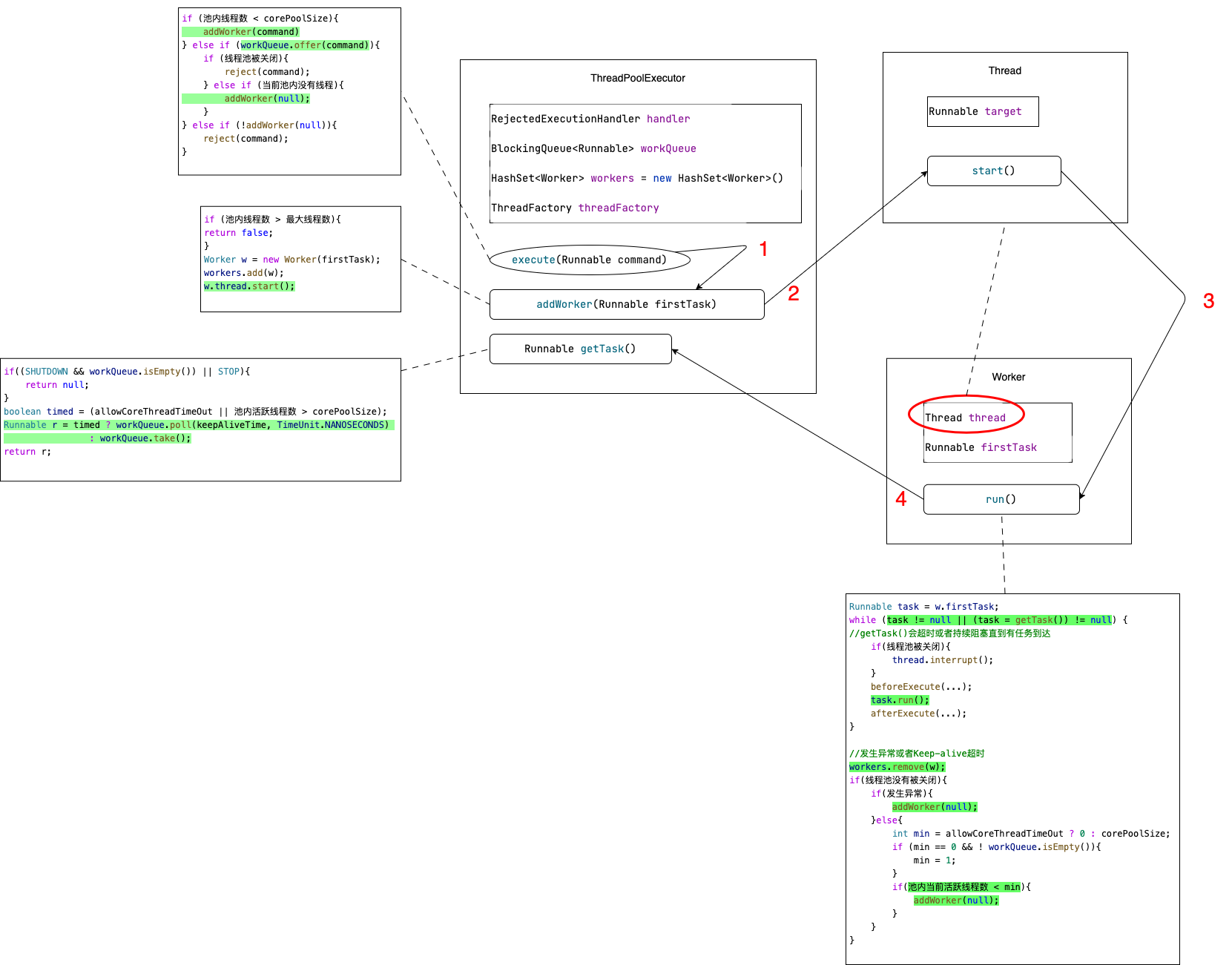
ExecutorService 使用线程池来执行提交的任务,通常使用 Executors 工厂方法进行配置。线程池解决了两个不同的问题:当执行大量异步任务时,它们通常提供了更好的性能,因为减少了每个任务调用的开销;同时,它们提供了一种管理资源、线程的方式,以便在执行任务集合时限制和管理这些资源的消耗。每个 ThreadPoolExecutor还维护一些基本的统计信息,例如已完成的任务数。为了在广泛的上下文中有用,该类提供了许多可调参数和可扩展性钩子。
然而,更多情况下应该使用更方便的 Executors 工厂方法 Executors.newCachedThreadPool(无限制线程池,具有自动线程回收),Executors.newFixedThreadPool(固定大小线程池)和 Executors.newSingleThreadExecutor(单个后台线程),这些方法预配置了最常见的使用场景的设置。
否则,在手动配置和调整此类时,请注意以下问题:
线程池的最小和最大线程数量
ThreadPoolExecutor将根据 corePoolSize和 maximumPoolSize设置的边界自动调整池大小(参见 getPoolSize)。当在 execute(Runnable)方法中提交新任务,并且正在运行的线程少于 corePoolSize时,即使其他工作线程处于空闲状态,也将创建一个新线程来处理请求。如果正在运行的线程数大于 corePoolSize但小于 maximumPoolSize,则仅当队列已满时才会创建新线程。通过将 corePoolSize和 maximumPoolSize设置为相同的值,可以创建一个固定大小的线程池。通过将 maximumPoolSize设置为一个基本上无限制的值,例如 Integer.MAX_VALUE,可以允许池容纳任意数量的并发任务。通常,核心和最大池大小仅在构造时设置,但也可以使用 setCorePoolSize和 setMaximumPoolSize动态更改。
按需构建
默认情况下,即使是核心线程,也仅在有新任务到达时才会创建和启动,但是可以使用 prestartCoreThread或 prestartAllCoreThreads方法动态地覆盖此行为。如果使用非空的任务队列创建线程池,则可能需要预启动线程。
如何创建新线程
private volatile ThreadFactory threadFactory;
private static final RuntimePermission shutdownPerm = new RuntimePermission("modifyThread");
使用 ThreadFactory创建新线程。如果没有另外指定,将使用 Executors.defaultThreadFactory,它创建的线程都在同一个 ThreadGroup中,并具有相同的 NORM_PRIORITY优先级和非守护进程状态。通过提供不同的 ThreadFactory,可以更改线程的名称、线程组、优先级、守护进程状态等。如果 ThreadFactory 在调用 newThread 创建线程时返回 null ,则执行程序将继续运行,但可能无法执行任何任务。线程池具有 “modifyThread” 的 RuntimePermission。”modifyThread” 权限它允许调用 shutdown 和 shutdownNow。通常,需要修改线程状态的代码(例如更改线程优先级或中断线程)需要此权限。要将此权限授予 Java 应用程序,您可以将以下行添加到应用程序的安全策略文件中,grant java.lang.RuntimePermission "modifyThread";这将允许应用程序在运行时修改线程。但是,授予此权限可能存在风险,因为它允许应用程序潜在地干扰 Java 虚拟机的正常操作。因此,它应该只授予需要它的可信代码。
addWorker 创建线程时有可能因为受到系统或用户控制创建失败。最常见的是 OutOfMemoryError ,因为需要给新的线程分配堆栈。
Keep-alive
线程池中线程的保活时间。如果池当前有超过 corePoolSize个线程,那么如果它们空闲时间超过 keepAliveTime(参见 getKeepAliveTime(TimeUnit)),则多余的线程将被终止。这提供了一种在池没有活跃时减少资源消耗的方法。如果线程池池稍后变得更加活跃,将构造新线程。可以使用 setKeepAliveTime(long, TimeUnit)方法动态更改此参数。使用 Long.MAX_VALUE TimeUnit.NANOSECONDS 可以防止线程被回收。默认情况下,仅适用于池内线程个数超过 corePoolSize 个线程的情况。但是,allowCoreThreadTimeOut(boolean)方法可以用于将此超时策略应用于核心线程,只要 keepAliveTime值为非零即可。
任务队列
Java中的线程池中的任务队列可以使用任何实现了BlockingQueue接口的队列。线程池的使用与队列的选择有关:
- 如果正在运行的线程数少于
corePoolSize,则执行器始终优先添加新线程而不是排队。 - 如果正在运行的线程数等于或大于
corePoolSize,则执行器始终优先将请求排队而不是添加新线程。 - 如果无法将请求排队,则创建一个新线程,除非这将超过
maximumPoolSize,否则将拒绝该任务。
有三种常见的队列策略:
- 不排队。对于工作队列来说,SynchronousQueue 是一个很好的默认选择,它将任务直接交给线程而不会保留它们。在这里,如果没有立即可用的线程来运行任务,将构造一个新线程。这种策略避免了处理可能具有内部依赖关系的请求集时出现死锁。直接交接通常需要无限制的
maximumPoolSizes,以避免拒绝新提交的任务。命令的平均到达速度比它们可以被处理的速度更快时,可能导致线程无限增长。 - 无界队列。使用无界队列(例如没有预定义容量的 LinkedBlockingQueue)将导致新任务在所有
corePoolSize线程都忙时等待队列。因此,最多只会创建corePoolSize个线程。(因此,maximumPoolSize的值没有作用。)当每个任务完全独立于其他任务时,这可能是适当的,因此任务不能影响彼此的执行。当命令的平均到达速度比它们可以被处理的速度更快时,会导致工作队列无限增长。 - 有界队列。有界队列(例如ArrayBlockingQueue)有助于在使用有限
maximumPoolSizes时防止资源耗尽,但可能更难以调整和控制。队列大小和最大池大小可以相互交换:使用大队列和小池最小化CPU使用率、操作系统资源和上下文切换开销,但可能导致人为降低吞吐量。如果任务经常阻塞(例如,如果它们是I/O绑定的),则系统可能能够为更多线程安排时间,而不是您允许的线程数。使用小队列通常需要更大的池大小,这使CPU更忙碌,但可能会遇到不可接受的调度开销,这也会降低吞吐量。
方法 getQueue() 允许访问工作队列,以便进行监视和调试。强烈不建议将此方法用于任何其他目的。当大量排队的任务被取消时,提供了两个方法 remove(Runnable) 和 purge 来协助存储回收。在判断任务队列是否为空时,不能仅仅依赖于 poll() 方法返回 null,而应该使用 isEmpty() 方法来判断。这是因为有些特殊的队列,比如 DelayQueue,即使队列中有元素,poll() 方法也可能返回 null,只有等到延迟时间过后才会返回非空。因此,为了保证线程池的正常运行,需要使用 isEmpty() 方法来判断任务队列是否为空。
拒绝策略
private volatile RejectedExecutionHandler handler;
private static final RejectedExecutionHandler defaultHandler = new AbortPolicy();
在方法 execute(Runnable) 中提交的新任务将在执行器已关闭时被拒绝,以及当执行器对最大线程数和工作队列容量都使用有限边界,并且已经饱和时也会被拒绝。在任一情况下,execute方法都会调用其RejectedExecutionHandler的 RejectedExecutionHandler.rejectedExecution(Runnable, ThreadPoolExecutor)方法。提供了四种预定义的处理程序策略:
- 在默认的ThreadPoolExecutor.AbortPolicy中,处理程序在拒绝时抛出运行时RejectedExecutionException。
- 在ThreadPoolExecutor.CallerRunsPolicy中,调用
execute的线程本身运行任务。这提供了一个简单的反馈控制机制,可以减缓提交新任务的速率。 - 在ThreadPoolExecutor.DiscardPolicy中,无法执行的任务将被简单地丢弃。
- 在ThreadPoolExecutor.DiscardOldestPolicy中,如果执行器没有关闭,则丢弃工作队列头部的任务,然后重试执行(这可能会再次失败,导致重复执行)。
可以定义和使用其他类型的RejectedExecutionHandler类。这样做需要一些小心,特别是当策略仅设计为在特定容量或排队策略下工作时。
钩子方法
这个类提供了受保护的可重写的 beforeExecute(Thread, Runnable) 和 afterExecute(Runnable, Throwable) 方法,它们在每个任务执行之前和之后被调用。这些方法可以用于操作执行环境;例如,重新初始化 ThreadLocals、收集统计信息或添加日志。此外,可以重写方法 terminated 来执行任何需要在执行器完全终止后完成的特殊处理。
如果钩子或回调方法抛出异常,内部工作线程可能会失败并突然终止。
析构
如果一个线程池在程序中不再被引用,并且没有剩余的线程,它将自动关闭。如果您希望确保即使用户忘记调用shutdown,未引用的线程池也会被回收,那么您必须通过设置适当的 Keep-alive Time、设置 0 个 corePoolSize 或设置 allowCoreThreadTimeOut(boolean) 来确保未使用的线程会被回收。
状态控制
private final AtomicInteger ctl = new AtomicInteger(ctlOf(RUNNING, 0));
private static final int COUNT_BITS = Integer.SIZE - 3;
private static final int CAPACITY = (1 << COUNT_BITS) - 1;
// runState is stored in the high-order bits
private static final int RUNNING = -1 << COUNT_BITS;
private static final int SHUTDOWN = 0 << COUNT_BITS;
private static final int STOP = 1 << COUNT_BITS;
private static final int TIDYING = 2 << COUNT_BITS;
private static final int TERMINATED = 3 << COUNT_BITS;
主要的线程池控制状态ctl是一个原子整数,包含两个概念字段:workerCount,表示已启动但未停止的有效线程数;runState,表示是否正在运行、关闭等。为了将它们打包成一个 int ,我们将 workerCount限制为(2^29)-1(约5亿)个线程。如果不够用,变量可以更改为AtomicLong,并调整下面的移位/掩码常量。但在这之前,使用 int 的代码更快、更简单。workerCount是已被启动但未被停止的工作线程数。该值可能短暂地与实际活跃线程数不同,例如当ThreadFactory在被要求创建线程时失败,以及退出线程在终止之前仍在执行记录工作。用户可见的池大小为工作线程集的当前大小。runState提供了主要的生命周期控制,取值为:
- RUNNING:接受新任务并处理排队的任务。
- SHUTDOWN:不接受新任务,但处理排队的任务。
- STOP:不接受新任务,不处理排队的任务,并中断正在进行的任务。
- TIDYING:所有任务已终止,
workerCount为零,正在过渡到状态 TIDYING 的线程将运行terminated()钩子方法。 - TERMINATED:
terminated()已完成。
这些值之间的数字大小很重要,以允许通过大小进行状态比较。runState 随时间单调递增,但不必经过所有的状态。存在如下状态转换:
- RUNNING -> SHUTDOWN:调用
shutdown()时,可能隐式地在finalize()中。 - (RUNNING or SHUTDOWN) -> STOP:调用
shutdownNow()时。 - SHUTDOWN -> TIDYING:当队列和池都为空时。
- STOP -> TIDYING:当池为空时。
- TIDYING -> TERMINATED:当
terminated()钩子方法完成时。
flowchart LR
RUNNING --> SHUTDOWN
SHUTDOWN & RUNNING --> STOP
SHUTDOWN & STOP--> TIDYING
TIDYING --> TERMINATED
等待 awaitTermination() 的线程将在状态达到TERMINATED时返回。检测从SHUTDOWN到TIDYING的转换不像您希望的那样简单,因为在SHUTDOWN状态下,队列可能从非空变成空,也可能从空变成非空,但我们只有在看到它为空后,看到 workerCount 为0时才能终止(有时需要重新检查–见下文)。
锁
线程池当中用到了两个锁,一个是全局可重入锁,另一个是Worker对象继承的AQS:
private final ReentrantLock mainLock = new ReentrantLock();
private final class Worker
extends AbstractQueuedSynchronizer
implements Runnable{
...
}
关于这两个锁的详细介绍,注释里描述的可能比较抽象,可以参考这边文章辅助理解:https://www.cnblogs.com/thisiswhy/p/15493027.html
大致意思上,全局锁用于控制 addWorker 锁同步,和线程池的 largestPoolSize 统计数据同步,以及 interruptIdleWorkers 的方法调用同步。
而Worker 对象的锁:自定义 worker 类的大前提是为了维护中断状态,因为正在执行任务的线程是不应该被中断的。而不能用重入锁,重入锁会在调用 interruptIdleWorkers 时中断进行中的线程。
Worker 类
Worker类主要维护线程运行任务的中断控制状态,以及其他一些次要的记录。这个类通过继承 AbstractQueuedSynchronizer 类来简化每个任务执行时获取和释放锁的过程,以保护正在运行的任务不被中断。实现了一个简单的非可重入互斥锁,而不是使用 ReentrantLock,因为不希望工作线程在调用 setCorePoolSize 等池控制方法时能够重新获取锁。此外,为了在线程实际开始运行任务之前防止中断,我们将锁状态初始化为负值,并在启动时(在runWorker中)清除它。
关闭线程池
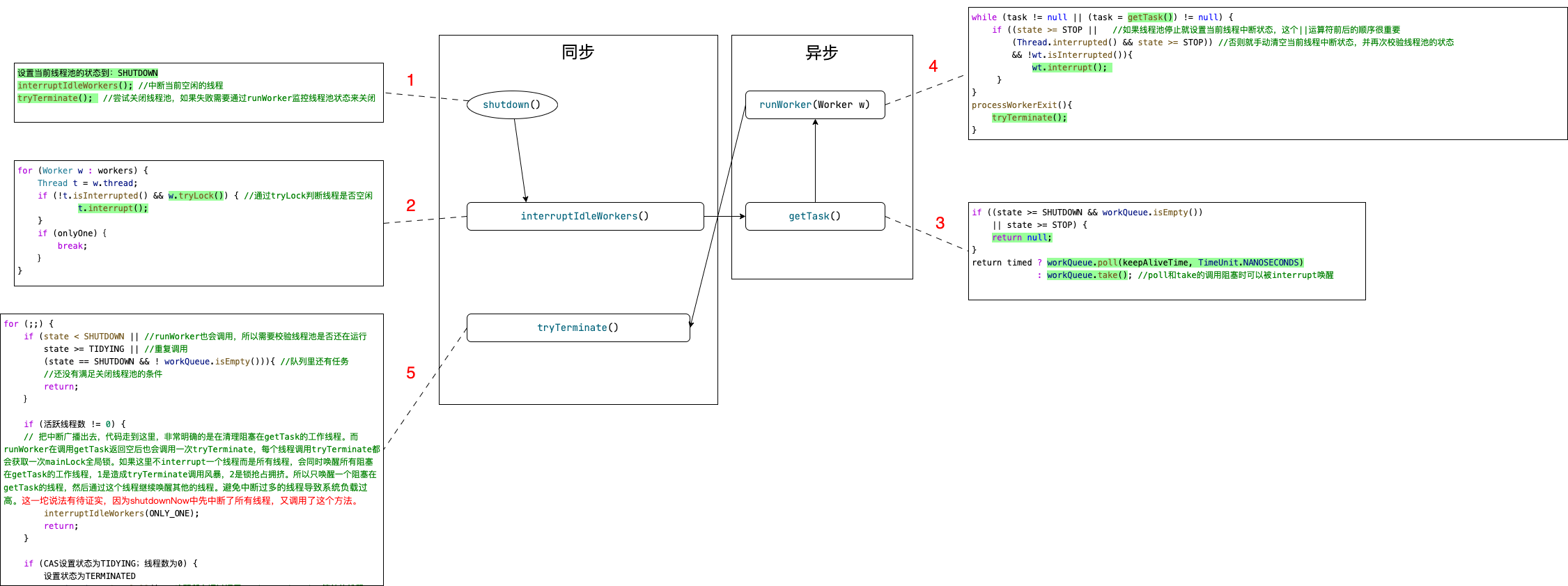
调用 shutdown() 会启动一个有序的关闭过程,在此过程中,之前提交的任务会被执行,但不会接受新的任务。如果已经关闭,则调用此方法不会产生额外的影响。此方法不会同步等待所有线程停止执行。如果需要等待,请使用 awaitTermination() 方法。
shutdownNow() 方法尝试停止所有正在执行的线程,停止处理等待中的任务,并把返回 workQueue 中的任务。这些任务在方法返回时会从 workQueue 中被清除。此方法不会同步等待所有线程停止执行。如果需要等待,请使用 awaitTermination() 方法。无法保证能够完全停止正在执行的任务,只能尽力尝试。此实现通过 Thread.interrupt() 方法来取消任务,因此任何无法响应中断的任务可能永远无法终止。
ScheduledThreadPoolExecutor
ScheduledFutureTask
继承自 FutureTask<V> 并实现了 RunnableScheduledFuture<V> 接口。ScheduledFutureTask 类表示一个可以在给定的延迟时间后执行的任务,它可以是一次性任务或周期性任务。
关键属性
sequenceNumber:用于在任务优先级相同时,按照任务提交的顺序执行。time:任务启动执行的时间(以纳秒为单位)。period:对于周期性任务,表示两次执行之间的时间间隔(以纳秒为单位)。正值表示固定速率执行,负值表示固定延迟执行,0 表示非重复任务。outerTask:实际要重新入队的周期性任务。heapIndex:任务在延迟队列中的索引,用于支持快速取消。
真正执行任务的 run() 方法
- 首先判断任务是否可以在当前运行状态下执行,如果不能执行,则取消任务。
- 对于非周期性任务,直接调用 FutureTask 的
run()方法执行任务。 - 对于周期性任务,调用 FutureTask 的
runAndReset()方法执行任务并重置任务状态。如果任务执行成功,则设置下一次执行时间,并将任务重新加入到执行队列中。
DelayedWorkQueue
延迟工作队列的实现,它继承了 AbstractQueue<Runnable>并实现了 BlockingQueue<Runnable>接口。使用基于堆的数据结构。每个 ScheduledFutureTask 还记录其在堆数组中的索引,可以在取消任务时不必循环到数组中查找。加快了删除速度(从O(n)降至O(log n))。但是,由于队列还可能持有不是 ScheduledFutureTasks 类型的 RunnableScheduledFutures 实现类,因此不能保证这些索引可用,在这种情况下,会退回到线性搜索。同一个 ScheduledFutureTasks 在队列中最多只能有一个。
扩容
堆数组的初始容量为16,在添加任务时判断如果任务数 >= 任务队列长度,就调用 grow() 方法一次扩容1/2。
任务队列
基于最小堆的数据结构实现,按照任务距离下一次执行的 delay 时间排序。数组的第0位永远是执行时间最早的,也就是接下来要执行的那个任务。通过 siftUp() 和 siftDown() 两个方法维护结构的正确性。
线程模型
ScheduledThreadPoolExecutor 使用了一种基于Leader-Follower模式的线程等待队列的实现方式,同一时间只有一个 leader 线程在限时等待任务队列中的第一个任务,其他线程不限时等待唤醒。当第一个任务到执行时间时,leader 线程唤醒一个新的 leader 线程,然后自己去处理到时的任务。
- 所有不需要超时结束的线程默认都在
getTask()的queue.take()方法中的无限for循环中,通过available.await()不限时等待。 - 添加任务时,会调用
available.signal()随机唤醒一个线程。 - 如果任务队列的第一个任务
queue[0]有任务,计算这个任务接下来的 delay 时间,当前线程作为 leader 通过调用限时等待available.awaitNanos(delay)等待任务到时后自动唤醒。 - 如果计算的 delay 时间 <= 0,说明该任务到达执行时间,则当前 leader 线程唤醒一个新线程当 leader,自己去处理到时的任务。
- 需要超时结束的线程会在
getTask()的queue.poll()方法中通过available.awaitNanos(delay)进行超时等待。
关闭线程池
可以通过设置 continueExistingPeriodicTasksAfterShutdown 允许在线程池关闭后继续执行未完成的周期性任务。通过设置 executeExistingDelayedTasksAfterShutdown 允许在线程池关闭后继续执行未完成的延时任务。
ForkJoinPool
https://juejin.cn/post/6932632481526972430
ForkJoinTask.join()
任务窃取的关键方法入口。
ABASE/ASHIFT
在JDK中 ConcurrentHashMap 和 ForkJoinPool 都有使用 Unsafe 类来操作数组的行为。这种方式对性能的提升基于使用场景暂且不考虑,但是这种使用方式需要理解其生效原理。这种代码有一种固定的格式:
Class<?> ak = ForkJoinTask[].class;
int ABASE = U.arrayBaseOffset(ak); //1️⃣
int scale = U.arrayIndexScale(ak); //2️⃣
if ((scale & (scale - 1)) != 0)
throw new Error("data type scale not a power of two"); //3️⃣
int ASHIFT = 31 - Integer.numberOfLeadingZeros(scale);
ForkJoinTask[] array = [...];
ForkJoinTask item = U.getObjectVolatile(array, (index << ASHIFT) + ABASE); //4️⃣
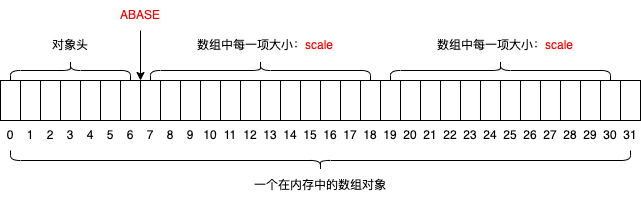
1️⃣:通过 Unsafe 类获取数组对象中的元素起始地址
2️⃣:通过 Unsafe 类获取数组中每个元素占用内存空间
到这里如果需要获取数组中某一个位置 index 的元素,就可以通过调用 U.getObjectVolatile(array, ABASE + (index ✖️ scale)) 来获得。
3️⃣:(scale & (scale - 1)) != 0 目的是判断 scale 的第 0 位是否是 0,借此判断奇偶。因为在 Java 中数组元素是基本数据类型或者对象地址,所以这里就确定了所有数组元素的大小都能是 2 的幂值。
4️⃣:31 减去 scale 高位 0 的数量,也就是计算 scale 低位有多少个 0,也就是计算 scale 是 2 的多少次幂。及 $2^{ASHIFT}=scale$,也就是 $2\times2\times…(ASHIFT个2)$。那么 $index \times scale = index \times 2^{ASHIFT} = index « ASHIFT $。所以 U.getObjectVolatile(array, ABASE + (index ✖️ scale)) 就等同于 U.getObjectVolatile(array, ABASE + (index << ASHIFT))。
SQMASK
值为0x007e,0b0111 1110。用于外部提交任务的没有线程的工作队列最多占 64 个偶数坐标位置。
WorkQueue.qlock
用于表示 WorkQueue 的锁状态。qlock 的值有以下几种情况:
qlock = 0:表示工作队列未被锁定,可以正常工作。qlock = 1:表示工作队列被锁定,其他线程不能对其进行修改。这通常发生在工作队列需要通过U.compareAndSwapInt()进行一些原子操作时,例如扩容、收缩等。qlock < 0:表示工作队列正在终止或已经终止。在这种情况下,工作线程应该停止处理该工作队列,并可能需要执行一些清理操作。
SCANNING
值为1,用于与 WorkQueue.scanState 的第0位进行位操作。为 0 时表示这个 WorkQueue 在运行任务。
在 tryCompensate 方法中用于检查线程池中的运行中的 WorkQueue 数量。
for (int i = 0; i <= m; ++i) {
WorkQueue v;
if ((v = ws[((i << 1) | 1) & m]) != null) {
if ((v.scanState & SCANNING) != 0){
break;
}
++nbusy;
}
}
if (nbusy != (tc << 1) || ctl != c){
canBlock = false; // 不能阻塞当前线程
}
这段代码的条件判断包含两部分:
nbusy != (tc << 1):nbusy是当前正在工作的线程数,tc是线程池中的总线程数。这个条件判断检查当前正在工作的线程数是否等于总线程数的2倍。ctl != c:ctl是线程池的控制状态,c是之前记录的线程池控制状态。这个条件判断检查线程池的控制状态是否发生了变化。如果发生了变化,说明线程池的状态可能不稳定,不能阻塞。
如果这两个条件中的任何一个满足,那么线程池的状态可能不稳定,不能阻塞。
队列 Mode
public ForkJoinPool(boolean asyncMode,...){
this(asyncMode ? FIFO_QUEUE : LIFO_QUEUE);
...
}
// Mode bits for ForkJoinPool.config and WorkQueue.config
static final int MODE_MASK = 0xffff << 16; // top half of int
static final int LIFO_QUEUE = 0;
static final int FIFO_QUEUE = 1 << 16;
static final int SHARED_QUEUE = 1 << 31; // must be negative
WorkQueue 中的任务队列是堆栈数据结构。窃取任务是从其他队列的 base 端也就是栈低获取任务。执行完任务后会把拆分后的放到自己任务队列的 top 端也就是栈顶。
由此可见栈低以未被拆分的大任务为主。拆分后栈顶以小任务为主。
一个 WorkQueue 在执行完一个任务后会调用 excelLocalTasks() 来继续执行自己任务队列中的任务。这时的任务执行顺序有两种。
一种是 FIFO 从栈低开始执行,这种是广度优先,会尽量的先把所有任务都拆分,最后执行最小的任务。因为任务窃取也是从栈低窃取,所以会产生锁竞争。
另一种是 LIFO 从栈顶开始执行,这种是深度优先,会尽量把一个任务一直拆到最细并执行。
构造函数中可以通过 asyncMode 来指定工作模式:
asyncMode = true:表示线程池中的工作线程采用 异步模式 (Asynchronous Mode)处理分叉任务。在异步模式下,工作线程使用先进先出(FIFO)的调度策略处理从未被 join 的分叉任务。这种模式可能更适合于那些工作线程只处理事件驱动型异步任务的应用场景。asyncMode = false:表示线程池中的工作线程采用 同步模式 (Synchronous Mode)处理分叉任务。在同步模式下,工作线程使用后进先出(LIFO)的调度策略处理分叉任务。这是ForkJoinPool的默认调度模式,适用于大多数场景,尤其是那些涉及到任务分解和合并的计算密集型任务。
通过设置 asyncMode 参数,可以根据实际应用场景选择合适的调度模式,以提高线程池中工作线程处理任务的效率。
workQueues 初始化
// `SMASK` 掩码 `config` 中的低 16 位表示 ForkJoinPool 的并行度。
static final int SMASK = 0xffff;
static final int MAX_CAP = 0x7fff; // max #workers - 1
ForkJoinPool(int parallelism,int mode){
if (parallelism <= 0 || parallelism > MAX_CAP){
throw new IllegalArgumentException();
}
//使用构造方法中的并行度参数 parallelism 来初始化 config
this.config = (parallelism & SMASK) | mode;
long np = (long)(-parallelism); // offset ctl counts
this.ctl = ((np << AC_SHIFT) & AC_MASK) | ((np << TC_SHIFT) & TC_MASK);
}
// create workQueues array with size a power of two
// 取出初始化的 parallelism
int p = config & SMASK;
//计算大于等于初始并行度的 2 次幂,p - 1 是为了兼容等于的情况;p > 1 的判断是为了确保至少有 2 并行度,之所以判断大于 1 也是为了兼容后面的判断中等于的情况。
int n = (p > 1) ? p - 1 : 1;
//下面两行计算大于 n 的 2 次幂减 1,填充最高位 1 右边的所有位为 1。
n |= n >>> 1; n |= n >>> 2; n |= n >>> 4;
n |= n >>> 8; n |= n >>> 16;
//n + 1 得到大于等于初始化parallelism 的2次幂;左移 1 位是因为 workQueues 中有一半是存储外部线程提交的任务,不启动 Thread。
n = (n + 1) << 1;
//最终结果限制 ForkJoinPool 中最多有 Ox8000 个带线程的 WorkQueue;Ox8000 个不带线程的 WorkQueue。总共有 0x10000 个 WorkQueue
workQueues = new WorkQueue[n];
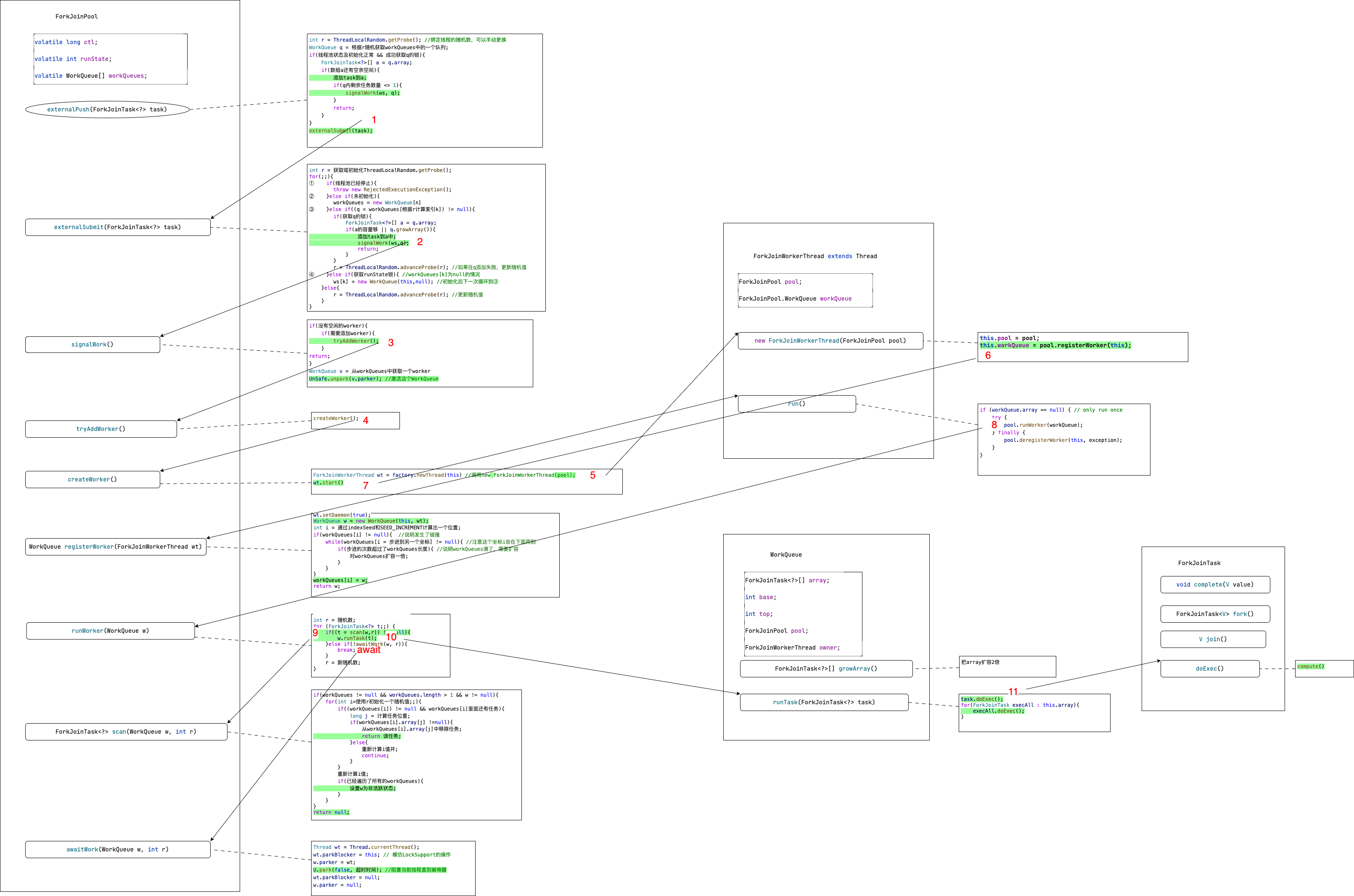
ForkJoinPool 初始化后只有一些配置,内部队列还都是空的。当调用提交任务时,会创建不带线程的偶数位置的 WorkQueue 并提交任务。提交成功后会创建其他带线程的 WorkQueue 来窃取并执行任务。当此 workQueues 初始化完毕。
ForkJoinPool 状态控制
volatile int runState; // 可以加锁的状态
// runState bits: SHUTDOWN 状态一定是负数;
private static final int RSLOCK = 1; //状态锁
/*RSIGNAL 是一个表示 ForkJoinPool 中 runState 的信号位,其值为 2。它的作用是在等待状态锁时,表示需要通知其他线程唤醒正在等待的线程。
在 awaitRunStateLock() 方法中,当一个线程尝试获取运行状态锁失败并且自旋等待也无法获取时,它会将 runState 的 RSIGNAL 位置为 1,表示需要唤醒等待的线程。然后,这个线程会进入阻塞状态,等待其他线程释放运行状态锁并发出通知。
当其他线程释放运行状态锁时,它会检查 runState 的 RSIGNAL 位是否为 1。如果为 1,表示有等待的线程需要唤醒,它会调用 notifyAll() 方法来唤醒所有正在等待的线程。
总之,RSIGNAL 的作用是在等待运行状态锁的过程中,作为一个信号来通知其他线程唤醒正在等待的线程。*/
private static final int RSIGNAL = 1 << 1;
private static final int STARTED = 1 << 2; //已启动
private static final int STOP = 1 << 29; //停止
private static final int TERMINATED = 1 << 30; //已终止
private static final int SHUTDOWN = 1 << 31; //已关闭
ForkJoinPool 中的状态流转主要由 runState 变量控制。runState 是一个整型变量,用于表示 ForkJoinPool 的运行状态。它的每一位都有特定的含义,以下是一些关键的状态位:
RSLOCK(值为 1):表示 runState 锁的状态。STARTED(值为 1 « 2):表示 ForkJoinPool 已启动。STOP(值为 1 « 29):表示 ForkJoinPool 停止。TERMINATED(值为 1 « 30):表示 ForkJoinPool 已终止。SHUTDOWN(值为 1 « 31):表示 ForkJoinPool 已关闭。
ForkJoinPool 的状态流转如下:
- 初始状态:当 ForkJoinPool 实例被创建时,
runState的值为 0,表示初始状态。 - 启动状态:当第一个任务提交到 ForkJoinPool 时,
runState的值会变为STARTED,表示已启动。 - 关闭状态:当调用
shutdown()方法时,runState的值会变为SHUTDOWN,表示已关闭。在此状态下,ForkJoinPool 不再接受新任务,但仍会执行已提交的任务。 - 停止状态:当调用
shutdownNow()方法或者发生异常时,runState的值会变为STOP,表示停止。在此状态下,ForkJoinPool 不再接受新任务,同时会尝试取消所有正在执行的任务。 - 终止状态:当所有任务都已完成执行且所有工作线程都已终止时,
runState的值会变为TERMINATED,表示已终止。在此状态下,ForkJoinPool 完全不再工作。
在整个状态流转过程中,状态会从初始状态逐步向终止状态过渡,不会回退到之前的状态。
任务分配和任务窃取
1、ForkJoinPool 对外提供任务提交接口有:
invoke提交一个任务,同步等待返回结果。invokeAll提交一组任务,同步等待所有任务完成。execute提交一个无返回结果的任务。submit提交一个任务,并返回任务对象,调用者可以在需要的时候join或get等待结果。
外部提交的任务会根据 ThreadLocalRandom.getProbe() 随机放到最多 64 个(个数受并行度限制)偶数位置 WorkQueue 的任务队列 top 位置。
2、WorkQueue 线程在没有任务时,会优先从 hit 或者 1 位置开始遍历 workQueues ,从有任务的 WorkQueue 任务队列的 base 位置获取任务。
3、运行任务,然后调用 execLocalTasks() 运行所有自己任务队列中的任务。如果配置了 FIFO ,就从 top 位置开始运行任务。否则从 base 位置开始。
4、ForkJoinTask 提供的任务控制接口有:
fork会提交任务到池中异步执行。如果在外部调用,会提交到common池中。join如果外部调用会同步执行并等待返回结果;如果已经调过 fork 会先去池中获取任务结果,如果任务还没有被执行就同步执行。invoke会同步执行并返回结果。involeAll会先把其他的任务都fork提交到池中,然后调用doInvoke同步执行第一个任务。如果任务有返回结果,可以搭配get获取返回结果。get由 Feature 接口继承而来,会同步执行并等待返回结果,可以配置超时时间。会抛出检查异常InterruptedException或ExecutionException强制使用者捕获。